 返回
发布
返回
发布





蔚小理辅助驾驶路线之争:谁最稳,谁最狠?
2021-11-02 08:49:52
时至今日,没有人再会怀疑蔚来、小鹏、理想在中国造车新势力的领跑位置。它们有了规模,赢得了市场认可,甚至在细分市场取得了局部领先,靠的不仅是模式创新与流程再造,更是因为最本质的产品与技术。
当多数车企还只是把辅助驾驶视为一项配置,依然按照传统的供应链整零关系进行采购时,造车新势力们却将其视为彻底改变汽车产业的重点之一,开始了全盘自研。由此在智能化领域培育的团队、人才与能力,蔚小理对传统车企已经形成了先发优势,甚至有了一定的技术壁垒。
不过,在蔚小理三者之间,尽管都是坚定自研的方向,尽管最终目的都是要将全部核心软硬件高度垂直整合,但是近三年来三家的辅助驾驶研发路径,却不尽相同。
当汽车产业的核心能力与关键成功因素发生改变时,我们更应该去了解各家辅助驾驶背后的研发逻辑,搞清楚话语权与价值链究竟掌握在谁的手里。
小鹏:扎扎实实小步快跑
小鹏G3的辅助驾驶,是从当时自主车企最主流的博世L2方案开始。但是,在这套能力与开放程度都不算高的辅助驾驶整包方案中,小鹏选择了一个最常见的场景作为自研的切入点,那就是泊车。
小鹏G3是国内最早采用视觉融合进行自动泊车的车型。以此为起点,小鹏培育“全环绕视觉”的能力,事实上比蔚来和小鹏都要更早一些——另外两家推出视觉融合泊车功能,都已经是2021年的事情了。
此后,小鹏的XPOLOT辅助驾驶系统,在博世的打包方案之上,逐渐增加了对自适应巡航、车道保持等功能。直到采用英伟达Xavier的小鹏P7上市,小鹏的全环绕视觉算法能力,终于有了发挥的空间。
一方面,Xavier平台高达30TOPS的算力,让硬件实力大幅增强;另一方面,英伟达的计算平台是开放的,提供了完整的开发环境可供车企进行算法、数据、环境的植入。

有了这样一个开放、高算力的平台,小鹏依然遵循着小步快跑的原则。从2020年6月开始交付起,小鹏P7还是先以对巡航与车道控制的优化为主,直到2021年1月才正式开始推送高速NGP导航辅助驾驶,到6月再推送VPA记忆泊车,从而在Xavier这个平台上,对高速+泊车两个场景的全环绕视觉算法进行了深度优化。
到了小鹏P5,小鹏通过引入激光雷达,开始做城市NGP导航辅助功能,预计会在明年一季度推送。而这个环节的核心,就是如何将激光雷达的感知与全环绕视觉能力进行融合。
而小鹏最终将高速+城市+泊车场景全部打通,构建全环绕视觉+激光雷达+高精地图融合能力的集大成者,应该就是预计会在明年亮相、采用英伟达Orin平台的全新中大型SUV。
所以,表面看起来小鹏的辅助驾驶功能最为激进,比如最早上激光雷达、最早开始城市NGP等,但是看过去三年小鹏的辅助驾驶发展路线,却有着严格的项目管理与技术落地产品。而2022年小鹏辅助驾驶的重点,就是加紧建构激光雷达与视觉融合算法的能力。
蔚来:从2.5T到1016T的“一步到位”
在与博世的辅助驾驶合作因为某些原因终止后,蔚来才开始组建辅助驾驶的软件团队,而这也让蔚来ES8直到2019年6月才真正拥有了辅助驾驶能力。
尽管Mobileye提供的是非常封闭的辅助驾驶整套技术方案,但是因为蔚来与Mobileye之间是直接对接,少了一个做域控制器的中间环节,所以主板、软件、数据分析等方面,蔚来全部都是自研。

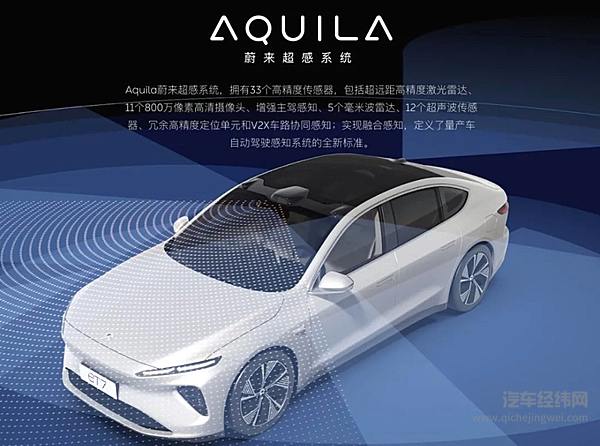
所以,在Mobileye EyeQ4的平台上,蔚来在一年半的时间里,陆续落地了包括NOP高速领航辅助、视觉融合泊车等高级功能,在蔚来ES8+ES6+EC6三台车型上搭载。而在明年一季度,基于英伟达Orin平台、搭载激光雷达的蔚来ET7预计将会交付。
从2.5TOPS算力的Mobileye EyeQ4到1016TOPS算力的英伟达Orin,从以单目前摄像头为主的视觉算法到全环绕视觉+激光雷达的融合算法,从仅具备NOP高速领航辅助,到高速+城区+泊车场景的打通,蔚来需要做太多的“一步到位”。
而这其中,最大的沟壑,就是“全环绕视觉”这一阶段蔚来将会跳过,这也是所有基于Mobileye EyeQ4平台车型都面临的潜在问题。
小鹏在P7上积累了环绕视觉算法实践经验,然后再将其与激光雷达感知算法融合,但在蔚来身上,这两步要同时进行,技术跨度比小鹏要更大。当然,蔚来ET7的落地时间要比小鹏全新中大型SUV要早大约一年,这一年时间里,蔚来仍有足够多的机会不断升级优化辅助驾驶算法。
理想:平台频繁切换的拖累?
理想与蔚来在技术路线上本有相似之处,都是基于Mobileye EyeQ4的平台,先从不断打磨最基本功能的算法开始,然后再逐步培育高阶功能。下一代车型上,也都会进化到英伟达Orin平台之上。
但是,理想在中间又插入了一个地平线征程3的平台。尽管算力从2.5TOPS升级到了10TOPS,但是在根本架构上并没有发生本质变化,反而要为算法的重新适配花费精力。
原本理想ONE计划于今年9月推送NOA高速领航辅助功能,但也许正是因为计算平台的切换,导致这一功能不断延期,最新的消息是在今年内会推送此项功能。
此外,在理想的规划中,还将会基于这套方案开发城市道路的领航辅助驾驶功能,包括斑马线识别、地面标识识别、停止线识别、信号灯提醒等。不过,这些原定于今年第四季度推送的功能,预计也会因为整体进度的延后而推迟。

而与蔚来面临同样的问题是,理想也要从基于前摄像头的方案一步跨越至环绕摄像头+激光雷达的方案。相比蔚来,理想还多经历了一步核心计算平台的切换。从现阶段来看,理想的辅助驾驶功能落地进度也是三家造车新势力中相对落后的一个。所以,2022年的理想,一定会在辅助驾驶能力形成代际差距之前尽力追赶。
未来:英伟达也会被蔚小理抛弃?
从解决方案体系完全封闭的博世、Mobileye,到只提供核心芯片、其余部分开放的英伟达,造车新势力在全盘自研中最核心的软件算法上,已经向前走了一大步。但是,从长远发展来看,高度垂直整合,一定是蔚小理这三家最有野心的造车新势力必由之路。
今年9月,曾任全球最大可编程芯片厂商赛灵思亚太地区实验室主任的胡成臣加盟蔚来任首席专家兼技术规划助理副总裁,就是蔚来要在芯片层面布局的一个重要信号。
按照一代辅助驾驶芯片3-5年左右的周期来看,在英伟达Orin之后,蔚来在下一代车型上已经开始规划使用自行设计的核心芯片——一如特斯拉自研FSD芯片一样。李斌也在年初蔚来日上含蓄地表示:“自动驾驶芯片不像通用芯片那么难。”
今年4月的时候,小鹏内部也传出正在中美两地同时进行自研芯片项目。即便不是自研芯片,国内的地平线、黑芝麻等新兴芯片企业,也都虎视眈眈着市场份额,寻求对海外芯片的国产化替代。
相比于众多还在琢磨供应商打包方案如何应用的车企而言,蔚小理将辅助驾驶开发作为核心能力的做法,正在越来越发挥出在智能时代的优势。而终极目标,就是要在真正的自动驾驶时代到来时,占领新商业模式的制高点。
自动驾驶的普及,会弱化驾驶者在购买决策中的核心地位,购车目标客户群也会被迅速扩大;与智能出行的结合,让消费者的拥车模式发生变化;自动驾驶与互联网生态的打通,会加速增值服务普及;自动驾驶还会让汽车制造从设计与硬件的差异,转向服务与体验的差异。
汽车产业价值链的重构之中,对今天的辅助驾驶、明天的自动驾驶研发,将会是最关键的环节。
转载文章,不代表本站观点。
 分享
分享



评论