 返回
发布
返回
发布



人人拥有专属司机的时代不远了? 电装积极挺进自动驾驶
2021-02-02 09:02:47
科技的进步,就是把曾经特别的存在,变成理所当然。
比如,配备专属司机。有了专属司机,移动出行会变得舒适而轻松。电装希望把这份少数人才能享有的愉悦,变成任何人都能享受的体验。有了值得信赖的自动驾驶技术,也许距离人人拥有专属司机的未来,就不远了。
如何实现自动驾驶普及
为了让自动驾驶技术奔向现实,世界各国有多家企业都在积极布局。科技发展日新月异,而先进的科技如何能融入到我们的生活,这就需要人与自动驾驶技术建立信赖关系。
自动驾驶融入社会主要面临3大壁垒:
01、提升用户价值
对用户来说既便捷又安全,同时具有经济优势。
02、减少社会损失
减少交通事故,缓解交通拥堵等,改善因汽车引发的社会负面性问题。
03、明确责任所在
发生汽车事故时明确责任所在。
降低人们搭乘自动驾驶汽车时的不安感,让自动驾驶被人类社会接受和喜爱,这些课题都是必须要跨越的鸿沟。其中,用户价值的提升和为了实现减少社会损失的社会基础设施的建立都会对技术研发带来影响。
在尝试解决这些课题的过程中,电装认为技术研发需要在理解人类特性的基础上进行推进。
要让人们信赖自动驾驶,就需要深度理解人们在何种状况下会如何感知、如何行动的特性。这样,人们就会认为可以放心地把自己交给自动驾驶。因此,电装在研发过程中十分重视人类特性。
将人的感受落实到自动驾驶技术中
日本电装先进移动技术事业开发部V系统开发室室长伊能宽表示:“实现安心和舒适的自动驾驶,重要的是了解人们在驾驶时到底是如何感受并进行驾驶的,并将了解的内容切实落实到设计制造中”。
人可以参照周围移动的景物来判断自己的速度。这个概念在计算机视觉中被称为Optical Flow(光流法)。此外,驾驶员判断与前方车辆的距离时,也不以实际距离和速度来衡量,而是以“再过几秒可能会撞到前车”这种体感速度来判断。
让车辆在预先设定好的车速内自动加减速来调整车距的ACC(自适应巡航控制),就是一项利用人类特性研发的技术。电装研究人类特性并应用到技术中的并不是只有这个。
轮胎动力学中有个 “摩擦圆”概念。当车辆在转弯过程中,踩刹车或加速时轮胎和路面之间会发生摩擦,横纵两个方向都会产生摩擦力,但最大摩擦力不变。把这个范围用概念图表示出来,就是摩擦圆。
我们把摩擦圆比作碗,轮胎产生的G值比作球。如果球飞出碗的边缘,就会发生漂移或旋转。以往的安全系统就是在球到达碗边缘之前在轮胎感受到负荷的时候,极力恢复轮胎的状态来确保安全。
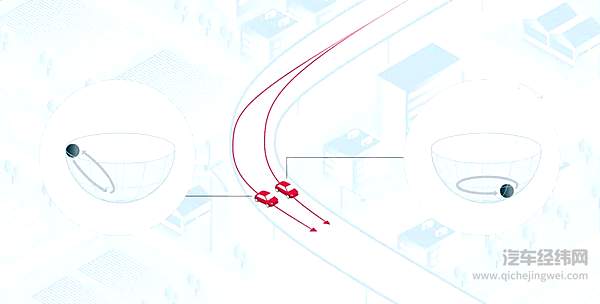
而更加安心安全的驾驶,就是实现所谓的“Ball in Bowl”状态,有效地在车辆运动的极限范围内进行控制。将这样的构造通过汽车工学视角进行解释,并将人类的感知反映到设计制造中,制造控制系统。这样,电装就可以实现像拥有熟练的驾驶员一样舒适且安全的自动驾驶。
该技术进行山路测试的结果显示,虽然有连续转弯的高难度路线,摩擦圆仍控制在界限值之内。
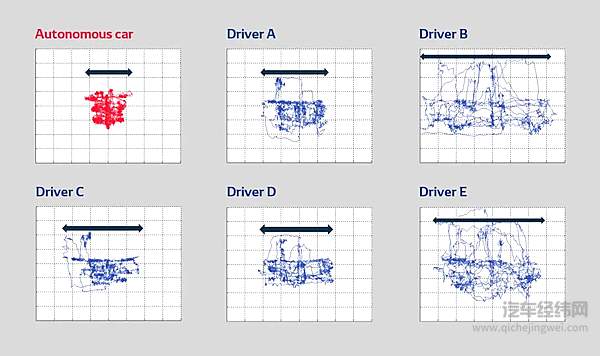
上图表示的是不同驾驶员行驶车辆时,车体是如何承受G值的。
在“Ball in Bowl”的想法中,图形越接近圆形驾乘感受越舒适。左上图一自动驾驶车辆的结果更接近圆形,可以看出比其他驾驶员实现了更稳定的状态。

电装在推进研究开发时可以进行山路测试等现场技术验证。电装充分发挥自身优势,致力于实现结合人类感觉的自动驾驶。
伊能在阐述加入自动驾驶技术研发的理由时目光炯炯有神:“自动驾驶在社会普及的过程中,需要人和汽车相互协助。怎样将驾驶的主导权平稳地过渡给机器。这些研究课题非常有意思。作为研究人员,再没有比这样的领域更让人兴奋的了”。
人可以自然地预测未来运动状态
机器代替人类驾驶,还需要将深度学习或者机器学习等AI技术应用到汽车中。生活中,人会先预判对象物的动作,再判断自己如何行动。AI的图像识别功能虽然在某些方面优于人类,但在非常规环境下就不够稳定,现阶段还存在很多课题。
日本电装先进技术研究所AI研究部AI应用研究室室长伊藤直纪表示:“人类无意识下做出的行动对于机器来说重现仍有难度。为了实现让人放心的自动驾驶,仍需要不断挑战各种课题”。
人可以无意识地认知到周围环境。对于大部分人而言,在不断移动的景物中识别物体是比较容易的事情。但对AI而言并非如此。要AI做同样的认知时,需要一边检测物体一边沿着轨迹追踪,当物体被遮挡,以现在的技术发现物体时有可能会出现错误。
为解决这一问题。电装开发的图像识别技术算法会参考过去的追踪信息并对现在的物体位置进行推测,提升了追踪性能。通过这个技术,即使物体被遮挡也可以精准地检测到。
通过这个技术,什么物体在什么位置,此物体过去的移动轨迹都可以知道。下一步就是要对接下来的移动轨迹进行预测。比如人在看到行人时,会自然地预测“这个人会走向哪里”。如果AI也可以这样预测,就有望实现信赖度更高的自动驾驶。
电装利用这些技术开展对行人轨迹预测的研发。AI结合过去的追踪信息进行预测时,对目的地的预测非常重要。首先需要根据道路的形状及建筑物的位置信息预测多个目的地,再推测通过什么路径到达各个目的地,输出选择概率高的内容。

上图是使用行人轨迹预测结果的“行人警示样图”。首先定义自己周围的危险区域,如果行人可能进入这个范围就会进行警示,当行人超过一定的概率会进入定义的危险区域,就会显示红框进行警示。
示意图像中虽然还没有出现警示,但是绿框中的行人在这之后若向画面的左侧移动,预测结果就会显示红色。同时也同步预测了行人会直行的可能性。对行人的轨迹预测中就运用了AI技术。
伊藤表示:“人类可以自然做到的事情,AI要想重现并不简单。但AI也有其擅长的领域。要实现自动驾驶普及,需要解决的课题还有很多,这个研究领域既有挑战性又有趣”。
安心把自己交给自动驾驶的移动未来
实现自动驾驶落地,必须要让人们认可它是放心安全的。无论技术如何进步,如果不被信赖,就很难被社会接受。
放心地把自己交给自动驾驶,自由地度过移动时光。为实现这样的未来,电装会持续积极推进尽可能融合人类特性的自动驾驶研发。*1
转载文章,不代表本站观点。
 分享
分享



评论