 返回
发布
返回
发布





这一回 丰田赢了特斯拉
2021-11-07 08:40:00
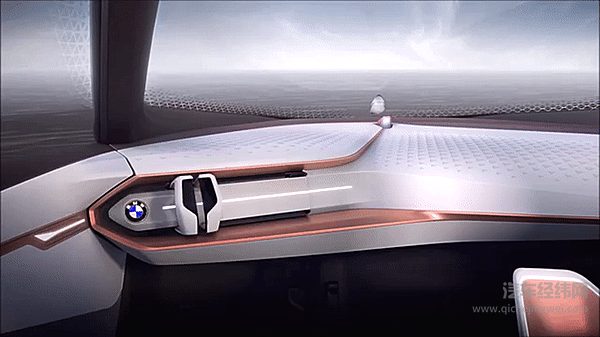
还记得特斯拉那个无比科幻、却又蠢到可笑的Yoke方向盘吗?
丰田在自己的电动车上带来了“同款”——好在,只是看起来同款。你可能难以相信,这次居然是一向给人以稳(luo)重(hou)印象的丰田成了未来先锋,用新技术“驯服”了特斯拉那个中看不中用的科幻方向盘。
常年热衷于在各重大场合公开diss电动车的丰田章男,在外界眼里简直是全球最大牌“电动黑”,但其实丰田一直在开发自己的纯电平台。彼时的称呼是e-TNGA,但这名字被C-HR纯电、UX300e这些油改电用滥了,并且我们解释过TNGA“并不是一个平台而是一堆平台”。
最终丰田的首个纯电平台在正式亮相后,还是有了自己的名字:bZ(意为Beyond Zero)。新平台的首个作品,也是丰田首款“原生”的纯电动车,叫做bZ4X。这是一辆RAV4大小的中型纯电SUV。
以上是用处不大的背景介绍环节。

无论bZ平台还是bZ4X车型,至少在我看来实在乏善可陈,这是一个虽专为纯电研发、却残留不少油车痕迹的纯电动平台/车型。但出人意料,丰田竟在这辆车上配备了全球第一个量产的线控转向系统——直接将bZ4X概念车上的方向盘搬上了量产版。
线控转向是让Yoke方向盘真正可用的关键,也是我们有朝一日实现无人驾驶的必定未来。

让“搓轮”滚进历史
每一个考科一因为不知道方向盘打了几圈而挂掉的孩子,每一个因为反手“掏轮”被教练骂哭过的孩子,都有理由给线控转向投上一票。
特斯拉的Yoke方向盘迷之难用,因为它依然需要你打1~2圈才能打满,于是一旦打过一圈手就时不时无处安放。而“丰田版Yoke”虽然看起来是一个样,但丰田借助线控转向,做到了单侧150°打满——不到半圈!
换言之,开这辆车你完全可以把手“粘”在方向盘左右两侧,双手全程不需要换地方。“倒手”、“搓轮”等等,从此与你无关。所以丰田称之为“One Motion Grip”,抓住方向盘就行了,打方向一个动作搞定。
那么问题来了,为什么以前的方向盘就必须要转好几圈,而不能方向盘打多少前轮就动多少呢?
因为方向盘的传动比通常是固定的,乘用车一般在12:1至20:1之间,即方向盘每转过12°-20°、前轮才偏转1°。如果转向比太小,比如1:1方向打多少轮偏多少,前轮对于方向盘的动作就会过于敏感。手上的任何细微动作,都会100%的作用到前轮,在高速行驶时这非常危险。
我们之所以能轻松开到120km/h巡航,背后是大转向比帮我们大幅缩小了方向盘的动作。哪怕一个不小心方向盘动了1°,在16:1的转向比下,前轮的动作就只有0.06°,这显然容易掌控得多。
但代价就是,当掉头或者停车需要打满方向时,你需要多打(好几圈,360°×n)才能让前轮偏转到头(一般在40°以下)。
也有一些车型配备了可变转向比。这是利用一些特殊手段,让方向盘在中央时转向比较大、两端转向比变小。从而在保证高速直线巡航的稳定性同时,让掉头停车时需要打的圈数更少一些。
可变转向比之一,齿条被加工为不同稀疏,对应不同的转向比
但机械结构的可变转向比,其转向比的可变范围是有限的(一般范围在10:1~20:1以内,即不到2倍),只能部分优化而不能解决问题。即便使用可变转向比,方向盘打满也仍然需要超过一圈——该换手还得换手。该“搓轮”还是得“搓轮”,方向盘就还得是个完整的圆。
要想真正实现随心所欲的转向比变化,只能上大招,线控转向。

现在所有汽车的转向系统,无一例外都是上面这种机械转向,方向盘是接在一根转向柱上,物理连接在转向系统上的。至于方向盘助力,即便是电动助力,也只是在你的手转动方向盘时帮你“推一把”。
方向盘和前轮之间,始终是机械联动的(所以没有助力其实车也能开,只是转向非常沉罢了),这就导致转向比不可能(或者说很难)有很大的可变空间。机械连接嘛,本来就应该你动多少我动多少。可变转向比,让“我动多少”可以有限浮动,但如果需要很大的浮动范围,机械结构就无能为力了。
这根转向柱还带来了其他麻烦。比如发生碰撞时它会是个危险,需要设计紧急断开机构,避免碰撞时它直戳驾驶员。
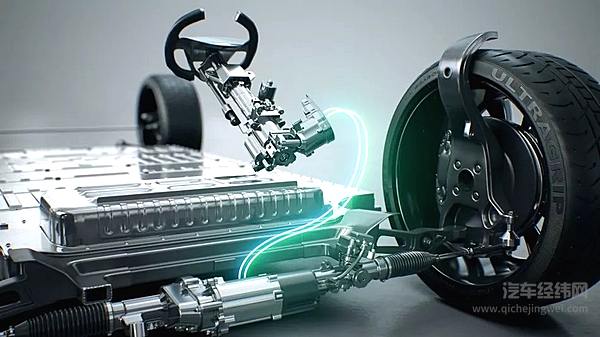
所谓线控转向(Steering By Wire,SBW),就是彻底砍掉了这根转向柱,方向盘与前轮之间不再有物理机械连接。方向盘的动作被转化为电信号,转向信号经数据线路到达转向电机,再由转向机将信号“还原”给转向轮。
也就是说理论上讲,线控转向系统的方向盘,可以安在车里的任何地方:前排、后排、车门、车顶……
转向输入数据化,彻底解放了转向比的变化范围。理论上,线控转向可以实现任何大小的转向比,以及任何变化范围、变化方式、变化速度的可变转向比,只需给系统设定特定的逻辑策略即可。

丰田的这个One Motion Grip方向盘,只有靠线控转向赋予的、极大的转向比变化范围,才能实现仅150°打满的“One Motion”效果。而正是150°单侧打满,才让“Yoke方向盘”终于可以正常使用了。
这是因为150°打满,意味着转向系统在两端的转向比约4:1左右,而在中心的转向比要变成不小于14:1~16:1(才能保证正常的高速驾驶性)。即可变转向比的变化范围,需要达到3~4倍。对比机械转向系统的可变转向比,变化范围只有可怜的不到2倍。
在丰田bZ4X之前,线控转向只出现在概念车,以及博世之类供应商的演示用demo car上。量产车里,2014年的英菲尼迪Q50率先搭载了日产DAS线控转向技术,也被认为是线控转向的量产先驱。

但日产DAS并非完全意义上的线控转向,它仍保留有一套机械转向系统备用。在某些情况下,一个离合器会将方向盘临时接入转向柱,此时就又变成了机械转向。Q50的线控转向并没有获得市场欢迎,甚至在初期还发生过多次缺陷召回,可以说不仅是先驱,还是先烈。
线控转向的原理听起来很简单,机械信号转电信号,电信号再还原机械信号罢了。之所以这么久才迟迟量产,主要原因也是稳定性和安全性方面,线控转向一直不够成熟可靠。Q50的线控转向系统,使用了多达3个ECU来确保冗余,还是不敢彻底取消机械转向柱。
线控转向的一大难点在于策略设计和标定算法,尽管在航空领域已经应用多年,但车用线控是个全新的开始。日产的线控转向供应商KYB研发了十几年之久,却依旧在上市短短一两年就爆发了问题导致召回。可见线控转向的调试设计有多少的繁琐、复杂、未知。
未来的“第三空间”必备
让转向比可以大幅变化,让科幻造型的方向盘可用,让打方向不用再频繁换手,还只是线控转向的现实功用。
未来,当真正的无人驾驶成为现实,当汽车可以作为移动中的会客厅,当你可以睡着觉让车自己开,当汽车真的成了“第三空间”,你就会需要最大化车舱空间,需要方向盘自觉“找个地方凉快去”。
卧榻之下岂容方向盘安睡。
 沃尔沃360c概念车,一觉到达目的地
沃尔沃360c概念车,一觉到达目的地
几乎所有畅想未来的科幻概念车,车内要么已经不设方向盘,要么方向盘可以折叠,这一定是需要线控转向技术作为支持。如果是转向柱机械连接的传统方向盘,很难被藏起来而不影响空间。
可以这么说:如果你相信有朝一日L5级自动驾驶上路,线控转向就是必然的趋势,它是充分发挥100%无人驾驶意义的预备。

当然现在讨论L5还为时尚早。不过即便是现在,这个名叫“One Motion Grip”(感觉也不是个正式名字)、形似飞机方向舵杆、没有上半圈的新奇方向盘,丰田也给出了充足的应用理由。
现在有啥用?
首先,众所周知汽车仪表盘是需要避开方向盘上缘的,于是大多数汽车将仪表设计在驾驶员视角下的,方向盘上半圈与中央气囊盖之间。
但这并非完美方案,因为仪表的高度只能固定在方向盘上缘以下,与路面之间总会有一个难以缩小的夹角,驾驶员看仪表必须视线脱离路面。至于这一小块半圆形缺口限制了仪表的形状和大小,相比之下倒属于近年来才出现的问题。

仪表的高度决定着显示面积和显示效果,现在随着液晶仪表到全液晶仪表的普及,所有厂商都在拼命缩小方向盘中央气囊盖的面积,从而留出更多的空间,让大面积的液晶仪表能够“被看见”。
 奔驰新车有目前最小的气囊盖,但仪表左右上角还是没辙
奔驰新车有目前最小的气囊盖,但仪表左右上角还是没辙
其实几十年来汽车设计师们一直在探索新的仪表方案。
比如二十年前一度流行的中置仪表盘,但因为实际效果有限而销声匿迹。比如标致颇具特色的抬高式仪表,让仪表位于方向盘上缘以上,但这压缩并限制了仪表高度(不然影响路面视野),适应不同身高的能力有限,也没成主流。
什么你说HUD?还是等全球人民实现了共同富裕再说吧。
 标致的做法并不适合所有人,且仪表面积受限
标致的做法并不适合所有人,且仪表面积受限
特斯拉在Model S上率先采用Yoke造型方向盘,目前仅有的好处也就是让仪表可读性更好了(如果不算视觉效果的话)。
丰田并没有将“去掉上半圈”的“红利”完全用在增大仪表面积上,而是将仪表向远离驾驶者的方向推,这样更加利于视线在仪表与路面间切换,离人更远的仪表也缩短了人眼切换焦点的时间。都是在考虑驾驶舒适性安全性,而非科技感——这倒是很丰田、很传统车企。
丰田也为bZ4X提供了常规方向盘选择,对比之下你还会发现:使用Yoke方向盘的车型方向柱上缘有一条类似传感器的部件,而使用常规方向盘的则没有。我猜可能是没有了上半圈的遮挡,诸如疲劳监测之类的驾驶员传感器也会更方便布置。
至于丰田官方提到的,增加了腿部空间、便于乘员进出、过滤不必要的路面振动,相比之下就当是白送的吧。

虽然这一次,一向稳重的丰田赢了一向激进的特斯拉,但其实谁都知道后者非不能也,实不愿矣。丰田在bZ4X上大胆采用最前沿的新技术,也多多少少带着那么一点掩盖bZ平台在技术层面不够进取的意味,这就不在本文的话题之内了。
机械系统永远意味着物理结构的约束,相对应的回报则是更高的可靠性。电子系统永远能带来物理空间的大解放,以及无尽的想象空间和应用可能,代价则是为提高可靠性和稳定性的巨大投入和潜在风险。
 分享
分享



评论