 返回
发布
返回
发布





理想的这条“下限” 值得一秀
2022-07-22 13:20:42
作为一辆家庭智能旗舰SUV,保护好车里的一家人是理想L9的首要责任,也是一切产品功能的基础。
在理想L9的产品逻辑里,安全被分成两条“线”:由车身结构所构建的安全性能“下限”和由主动安全功能来守护的安全性能“上限”。

这条“下限”非常高
被动安全是一辆车安全性能的“下限”,理想L9对这条“下限”的要求是非常高的。
212项整车和系统验证
在研发过程中,理想L9的车身设计经过了212项整车和系统验证,除了咱们常在媒体上见到的碰撞测试项目以外,还包括沙地翻滚、路肩翻滚、螺旋翻滚、整车托底、前门后门柱碰、88公里/小时追尾、小角度追尾和正碰等等。
如果你平时关注碰撞测试,会发现理想汽车对测试项目丰富度和指标要求都明显高于第三方碰撞测试,并且在全部212项验证场景中,理想L9都能保护车内乘客的安全。

在车身设计领域,您可能不知道的是:针对不同碰撞场景,不是一味的“硬”就更好,而且有时对车身同一位置的“软硬”要求是完全相悖的。
例如车身前轮靠后一点的位置结构,小偏置碰撞的要求是不希望这个位置有太大的形变,也就是需要“硬”一些,但正面碰撞则希望有一定的变形以缓解冲击力,也就是需要“软”一些。
面对相反的强度要求,总不能在不同碰撞测试中换用不同的材料吧。
为了解决这个问题,理想L9通过结构设计另辟蹊径,调整了在偏置碰撞事故中的车身姿态,从而兼顾了在两种事故类型中的安全要求,在正碰和小偏置碰撞测试中都能有效保护车内乘客的安全,这些细节的设计需要前期大量的测试、调整和验证。
这些精细化的调整都需要反复的优化、试验、调整验证、再试验,为了满足高频复杂测试的需求,理想汽车国内首创的自主研发了SOB子系统试验和台架,能在研发过程中更高效更大量地进行项目测试,通过碰撞能量分析,在研发中不断对车身结构进行优化。
每一次测试、验证和调整,都让理想L9的车身更安全一分。

12个位置的气囊/气帘
作为一款为家庭打造的智能旗舰SUV,在安全气囊配置选择方面,理想汽车也做了大量的研发验证工作,确保理想L9对车内乘员的360度全方位保护。
理想L9在车内第一排正面标配两个气囊,第一排侧面标配两个气囊,第二排侧面标配两个气囊,而在车内两侧还有可覆盖第一排、第二排和第三排的两个侧面气帘,确保覆盖车内12个安全防护位置,形成360度的被动安全保护。

除了整车的气囊配置以外,还有很多用户关心副驾驶位气囊的弹出方式。
在理想L9的副驾驶位前方拥有一块15.7英寸的车规级OLED屏幕,传统的气囊弹出方式确实无法满足车辆气囊弹出的被动安全要求。
理想汽车首创了副驾驶气囊专利技术,通过前期详细的研发和反复多次的试验,可以确保在气囊弹出时对副驾驶乘员进行充分保护并确保副驾屏幕的完整性避免次生伤害。
电池双重保护
对于一款新能源车来说,除了对乘员舱的保护,电池安全同样至关重要。理想L9电池组采用侧防护梁和铝合金外壳组成的双重防护设计,保护电池侧方免受直接冲击。
在电池底部也配备了整车最低的防撞梁及电池护板,以保障电池底部安全。
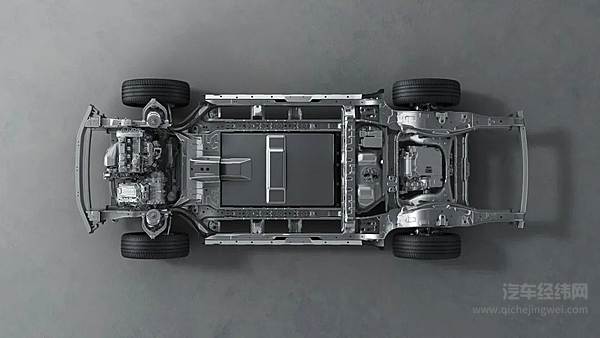
即使在严苛的侧面柱碰和底部托底测试中,双重保护的结构设计也可以保证动力电池组的安全。
此外,由于理想L9配备的是新一代三元锂电池,采用更高安全性的阻燃材料和热失控防控技术,每个电芯有相对独立的隔热阻燃空间,即使意外真的发生,也能做到只冒烟不起火,进一步控制风险。
最终,在交付给用户的答卷上,理想L9高强度钢和热成型钢的使用比例超过80%,其中32%的热成型钢。
高强度钢使用比例和车身扭转刚均高于竞争对手,同时,理想L9也将满足C-NCAP的最高安全标准,在侧面柱碰和双侧小偏置碰撞中都将达到G的最高评级。

对于理想L9来说这些都还不够,理想汽车所制定品牌安全标准要更严苛于第三方测试,因为对于理想L9来说,车身被动的安全是一切的底线。
一条不断突破的“上限”
在高标准的被动安全基础上,理想L9希望通过自研的AD Max智能驾驶系统尽可能规避或减轻交通事故的发生和危害。
视觉感知+激光雷达+高精地图

全栈自研的理想AD Max智能驾驶系统一个基本要求就是符合中国路况环境,其中包括几个比较特殊的场景即静止车辆、道路施工和加塞。
为此,理想L9采用的是BEV融合算法,你也许听说过BEV算法,它是利用纯视觉进行运动感知预测,它的好处是功能上限非常高。
但是BEV也存在一定问题,例如很难识别夜晚形状不规则的侧翻车辆等。
所以,理想汽车又在BEV视觉信息的基础上,增加了激光雷达和高精地图信息输入作为辅助,独创了BEV融合算法,且加入了视觉安全模块和激光雷达安全模块,与BEV框架模型互为冗余,能在极限环境下为安全提供多一层保障。
为了发挥出软件算法的能力,硬件上理想L9采用了6颗800万像素摄像头和5颗200万像素摄像头,实现了对车身周围及远距离的360°全方位感知。
其中,正前方的两颗800万像素摄像头组合,可实现对120°广角范围及最远550米内车辆、行人及锥桶等物体的识别。

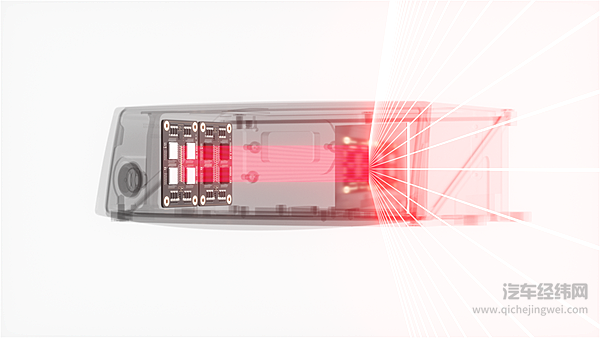
前向的车规级激光雷达配备128个激光器,全局分辨率为1200x128,点云数量达到153万/秒,在已经量产的车规级激光雷达中综合性能是最强的。
在暗光、强光这类摄像头受限的场景,激光雷达可确保系统对环境感知的准确性,帮助车辆提升对静止及异形障碍物的识别,例如高速公路上的事故静止车辆、施工路障等物体等等。
理想汽车的自研算法也在国际上已经斩获了多个权威奖项,涵盖纯视觉检测精度、纯视觉跟踪、多传感器融合检测和交互预测。所有的算法成果也都将在理想L9上得以应用,使其拥有更强的城市复杂路口危险检测能力。激光雷达和视觉双重融合算法提升了安全性,在很远距离就能识别到危险信息,并进行相对舒适的刹停动作。
理想汽车将会开源AEB源代码,供行业内使用,为广大消费者的出行安全贡献力量。
交付只是开始
交付时的状态并不是理想L9辅助驾驶能力的“天花板”,理想把过去常规的线性研发流程转化为了闭环流程,在交付后通过收集用户反馈的信息和数据,并再次投入到研发流程中,以此为基础,理想AD Max的能力也会持续不断的提升。
在这样的闭环和自主学习流程下,此前理想ONE的AEB能力在六个月的时间里就提升了一倍。
如今针对国内前三大影响驾驶安全的情况(异形车、道路施工、加塞),理想汽车已经拥有AEB危险场景数据库超过15万个,施工场景库超过3万个,有效学习场景总里程1.9亿公里作为储备。

数据的积累将不断迭代提升理想AD Max的辅助驾驶能力,使这个安全“上限”持续地被拔高,并通过OTA技术,将更好的辅助驾驶能力呈现给车主们。
理想L9以高标准、精细设计的的车身结构作为安全“下限”,在事故发生时竭力保护全家人的安全;并以高水平且不断积累和进化的理想AD Max作为安全“上限”,在危急关头尽可能避免事故的发生或减轻事故危害。
二者合力,构成了理想L9守卫一家人安全出行的“底线”。
转载文章,不代表本站观点。
 分享
分享



评论