 返回
发布
返回
发布





车和家首谈L4自动驾驶 要在2025年商业化运营Robo-taxi
2018-07-02 09:14:07
6月28日,在2018智能汽车跨界融合高峰论坛上,车和家自动驾驶总监郎咸朋首次对外介绍了公司的无人驾驶战略和共享出行战略。
车和家共享出行的最终目标是打造专门为共享出行定制的无人驾驶Robo-taxi,其自动驾驶水平可以达到SAE L4。首批量产车计划于2025年投入商业化运营,每天为用户提供1亿公里的出行服务。
一个企业战略目标
今年1月起,车和家选择自建团队,专门负责自动驾驶共享出行解决方案的设计、研发和产品化。曾经在百度L3事业部任职的郎咸朋加入车和家,担任自动驾驶部门的负责人,现在核心团队搭建已经基本完成,算法、数据、服务相关的负责人已经就位。
在众多车企公布的自动驾驶时间表中,车和家的目标看起来是一个相对具体的计划——打造用于移动出行的Robo-taxi(SAE L4),到2025年量产并投入商业化运营,每天为用户提供1亿公里的出行服务。和很多企业试水自动驾驶研发的做法不同,车和家把无人驾驶Robo-taxi上升到了公司的战略目标。
郎咸朋向车云菌指出,到2025年,车和家拿出来的不会是试运营的“半成品”,而是可以正式投入商业化运营的量产车。虽然在过渡阶段可能会有安全员跟车,但是终极目标一定是没有驾驶员的无人驾驶出租。Robo-taxi在公司内部被视为一个商业化目标。今年3月车和家牵手的滴滴,会在这场商业计划中扮演重要的角色。
 构成车和家自动驾驶系统的四大平台
构成车和家自动驾驶系统的四大平台
届时,车和家提供的自动驾驶系统将由完整的车载系统平台、人工智能平台、数据仿真平台和车队管理平台构成。所有无人驾驶出租车上的数据都会通过网络回传到数据仿真平台,人工智能平台将会用于算法的集成优化,随着车队规模的扩大,将有一个车队管理平台来统一管理。
“不是单纯研发,就是要落地”。郎咸朋评价这个目标时表示,“其实还是很激进的”。
“软硬一体”才是最快的方式
相比很多早早制定2025年计划的企业,研发主力刚刚就位的车和家,面临着一个不小的挑战——在比别人更短的时间里做出一款自证实力的产品。在回答这个问题时,郎咸朋选择了“软硬一体”,并且在他看来,这才是最快的方式。
行业里从来不缺自动驾驶原型车。郎咸朋告诉车云菌,快速搭建一辆原型车很容易,科技公司普遍采用的做法是购买线控改装车,先做软件算法,然后再移植到正式的车上去。但是基于不同车辆定制的算法,并不具备普适性,移植到另一辆完全不同的车上时,研发人员很容易在硬件适配阶段耽误大量时间。
郎咸朋向我们举了一个简单地例子:一辆百公里加速度3s的车,在设计自动驾驶决策规划算法时,可以在某个场景选择超车,但是当一辆性能欠佳的车处于同一位置,却只能跟车行驶。车的性能不同,软件算法也会随之调整。先找Demo车做软件算法,然后再移植的方式, 在郎咸朋看来,并不是一种特别好的研发理念。
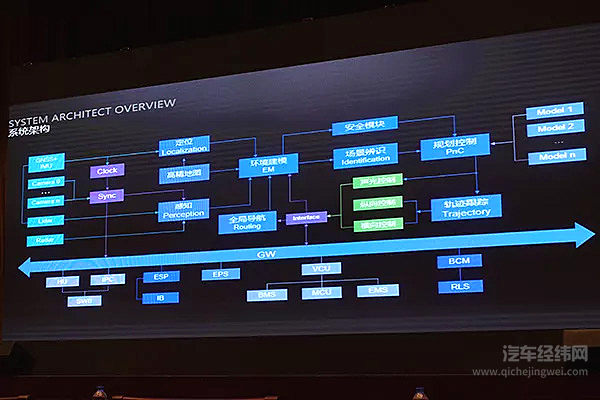 Robo-taxi的整套系统架构
Robo-taxi的整套系统架构
车和家采用的“软硬一体”自动驾驶研发思路在于——一开始就要明确这是一辆什么样的自动驾驶车,整辆车从设计之初,底盘、执行器和电源冗余设计,以及车内空间设计等等,都在为最终目的服务。传感器位置、类型、计算平台的选择以及算法,都跟车辆硬件平行开发,并不存在先后关系。虽然时间紧、任务重,车和家选择的做法是从零开始,正向开发一辆自动驾驶车。
当然为了抢占2025年的时间节点,车和家在效率最大化方面也考虑了一些富用方案。据郎咸朋透露,公司即将上市的首款SUV将会搭载自动驾驶L2.5系统,功能上类似特斯拉的Autopilot,由车和家投资的易航智能科技有限公司主要负责研发工作。
这款车将会在Robo-taxi的研发过程中,承担起非常重要的驾驶行为数据采集工作。在这款车上市之前,郎咸朋团队会完成数据平台的搭建,确保明年新车上市时可以做到数据准确回传,OTA功能也会在这辆车上率先使用。
同时,团队将基于首款SUV框架改制第一批自动驾驶车。这批Demo车的主要作用就是将数据服务、存储、分发、制作等技术走通,并且完成一些算法通用部分的准备,等到2019年上半年推出面向网约车的Robo-taxi之后,再把上述通用基础能力移植到定制好的Robo-taxi上,同时在正式车上进行后续的算法开发。
接下来的工作也已经有了具体的进度表:2019年左右Robo-taxi样车完成之后,车和家会在2020年完成车辆设计整体定型,通过1-2年的时间进行算法完善,2023年-2025年开始大批量规模化量产。虽然时间很短,但是郎咸朋认为,“只要前面软件和硬件节奏能跟上,还是很有希望的”。
类人的决策
自动驾驶拥有庞大的产业链,每个角色都在其中各司其职。在时间和人力有限的情况下,车和家为自己选择的核心能力,是规划决策算法。
L2、L3自动驾驶主要是感知和执行方面的技术,对L4自动驾驶而言,这两部的技术已接近成熟,而决策规划的难题依然悬而未决。和可以人类介入的L2、L3自动驾驶相比,L4自动驾驶车全权由系统控制,对决策规划能力也提出了更高的要求。
在此先做一个简单地背景介绍。现阶段的规划决策算法需要大量的驾驶行为数据进行训练,研究方向有两个,一个是完全基于规则(Rule-based),一个是基于深度学习(Learning-based)。前者把车辆在某种场景下的决策用数学公式设计好,哪些情况可以超车,哪些结果选择跟车。基于规则的好处是确定性,但是世界复杂多变,很难做到穷举所有场景,构建出公式来进行描述。
基于深度学习的方法,是指通过给系统“喂”足够多的数据,对系统正确或错误的做法设立奖惩机制并加之判断,久而久之,算法就能在面对不同情况时给出最优解。这种方法的缺点在于,系统通过学习获得一个参数下的不错表现,但是当发生安全问题后,原因不可解释,问题也无法解决。
由于驾驶环境的复杂性,仅用上述方法的某一种,很难兼顾所有的驾驶场景,并确保安全性。

在谈到车和家的算法研发思路时,郎咸朋给提出车和家在将来决策规划研发中,会采用类人的思路做决策研发,让自动驾驶开车时像人一样思考,既能做到确保安全优先,容忍不确定性,还要能不断自我进化,兼顾长短期目标,并且保正及时作出判断。
其中在确保安全优先方面,车和家的想法是,对安全性相关的部分制定规则,比如车不能开到马路牙子上去,不能左转进入逆行车道……工程师把这些跟安全性相关的部分用数学公式表示,制定出一些强制的规则。与安全无关的驾驶舒适性内容,再采用基于深度学习的方法来实现。这样的做法,可以保证安全相关的部分更加可控、直观,与舒适相关的部分更加灵活。
同时,在一些决策算法的设计上,郎咸朋希望有更加周到的考虑。工程师会兼顾长期目标和短期目标,来进行决策制定。一个例子就是在高速公路跟车时,选择向左变道超车,还是向右侧变道,就取决于车辆是否要从不远处的匝道驶离高速。当拥有更加全局的信息时,决策才会更聪明。
郎咸朋告诉我们,对于最核心的决策规划部分,车和家的总体计划是减少深度学习算法的比重,在研发过程中,尽可能地把一些现在不可描述的东西,逐渐形成规则。这一切的出发点,都是因为自动驾驶汽车是一个以安全为基础的产品。
数据,数据,数据
谈到至关重要的数据时,郎咸朋提到了自己关于自动驾驶产品化的思考。
无论是车和家利用首款SUV做的数据准备,还是决策规划算法的训练需要,大量真实的人类驾驶数据是自动驾驶产品落地的关键,也是每一家企业想牢牢握在手中的宝贵资源。郎咸朋在强调数据的重要性时指出,“没有数据,所有的计划都是纸上谈兵”。
 车和家的整套数据流程
车和家的整套数据流程
他对数据的重要性的认识,来源于一段以往的研发经历。郎咸朋曾经使用过一个改良后的开源算法代码框架,在训练数据量较少的情况下,识别率只有80%-85%,但是在海量数据的训练下,实现了97%-99%的识别准确率,同等数据量的前提下,追平甚至超越了一些研究领域创新算法的表现。
科研和产品,也有相通之处。在科研领域,如果有十公里的数据,就可以写出一篇学术论文,一百公里的数据,已经是非常丰富的论文材料,很少能看到基于上千公里数据的学术研究。“科研所需的数据量,和做自动驾驶产品所需的数据量相比,完全不是一个级别”,郎咸朋说。
这也让他明白了数据在产品化过程的重要性。科技公司很难找到不同的人在真实场景中大量驾驶测试,为自己积累数据。虽然雇佣测试人员有机会在数据量上获得大量积累,但是也难以避免数据同质化的情况——不同的人开车,一定会有不同的驾驶习惯和方式,更不要说地域覆盖广度的问题了。
而车企拥有着最多的数据资源,在回收数据方面也能很好地兼顾多样性。并且车和家会有数据表达、采集、生产的一整套流程,确保数据在自动驾驶算法训练中更好地发挥价值。首款SUV上市后,后台就会开始获得车辆回传的驾驶数据和环境数据,据郎咸朋估计,到2021年预计会有百亿公里数据的回传,应该足够用来支撑自动驾驶的算法研发工作。
郎咸朋在演讲结束时表示,车和家的自动驾驶团队的工作才刚刚开始,后面7-8年的时间,希望能很严肃地把这件事完成。
某种程度上,车和家自动驾驶项目的顺利推进,很大程度上取决于首款SUV的市场表现。根据计划,车和家的首款SUV将是一辆续航里程 700公里+的增程式电动车,在今年下半年发布,2019年正式上市。待到新车上市和数据量的回传,希望车和家自动驾驶的研发,会迎来一个更快的发展阶段。
 分享
分享



评论